
Testing, Results, and Performance

1
Low-Level Tests
-
Stepper motor torque and backlash evaluation
-
Microstepping calibration and step accuracy tuning
-
Power consumption analysis (battery draw, voltage stability)
-
Limit switch activation and GPIO response check
-
Communication protocol (SocketIO + JSON) verification
2
Mid-Level Tests
-
Subsystem verification: motors, limit switches, and power circuits
-
Wiring integrity and circuit layout validation
-
Motor control logic testing via Raspberry Pi GPIO
-
UI-to-hardware command pipeline testing (app to Pi)
-
Heat management assessment within enclosed base

3
High-Level Tests
-
Full integration of mechanical, electrical, and software components
-
Celestial tracking accuracy and responsiveness (RA/DEC motion)
-
End-to-end test of mobile app selection to telescope movement
-
Polar alignment assistance and automated homing functionality
-
Field test of system stability, precision, and user experience



Challenges, Revisions & Improvements
Challenges
-
Boot issues with Raspberry Pi
-
TFT screen replaced by IPS display
-
Voltage instability
-
Homing misalignment
Solutions
-
Modular power hub and complete redesign
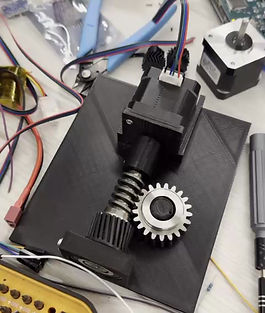
-
Refined worm and helical gear alignment
-
Revised UI for feedback and control
Future Improvements
-
OTA firmware updates
-
Enhanced cooling and battery backup
-
Sensor integration for weather/environment